Novedoso enfoque de las micromáquinas móviles autoensamblables
La construcción de un robot con muchos componentes diferentes es una tarea difícil, sobre todo a escala micro. Muy conveniente, si las partes se ensamblan solas.
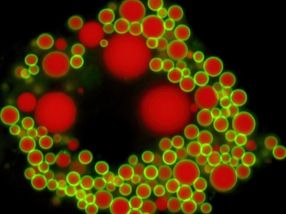
Montaje programable y con forma codificada de micromáquinas móviles bajo campos eléctricos.
MPI-IS
El auto-ensamblaje de las partículas no es nada nuevo. De hecho, se ha logrado durante décadas. Las partículas magnéticas que interactúan bajo campos magnéticos rotatorios se autoensamblan, al igual que los componentes que se unen a través de reacciones químicas. Los microswimmers bacterianos son un ejemplo de esto. Sin embargo, el resultado final de estas micromáquinas autoensambladas ha sido muy limitado - hasta ahora.
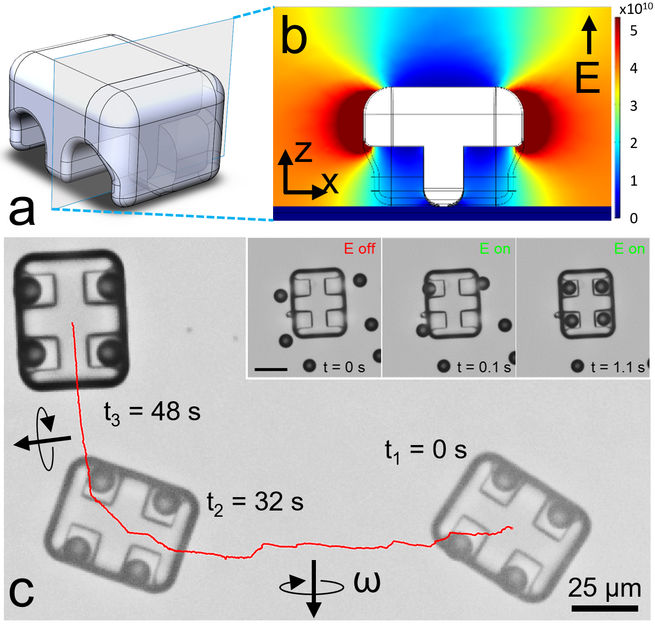
Los científicos del Instituto Max Planck de Sistemas Inteligentes de Stuttgart (MPI-IS) han adoptado un nuevo enfoque al autoensamblar no una, sino muchas máquinas de diferentes formas de tan sólo 40 a 50 micrómetros de tamaño, aproximadamente la mitad del diámetro de un cabello humano. Demostraron que el autoensamblaje programable de sus micromáquinas es posible únicamente a través del diseño y la estructura de los componentes individuales: haciendo uso de las fuerzas dielectroforéticas que evolucionan alrededor de las partes individuales cuando se exponen a un campo eléctrico. En este entorno, el diseño y la estructura de los bastidores de las máquinas, por un lado, y de los actuadores magnéticos, por otro, permiten su configuración controlada, haciendo que el montaje sea programable. La investigación pionera de los científicos, el ensamblaje dinámico de micromáquinas móviles con codificación Shape-encoded, fue publicada en Nature Materials el 24 de junio de 2019. Berk Yigit, estudiante de doctorado en el Departamento de Inteligencia Física del MPI-IS, y Yunus Alapan, ingeniero mecánico y postdoctoral que trabaja en el mismo departamento, son ambos autores principales. Metin Sitti, director del MPI-IS y jefe del Departamento de Inteligencia Física, es el último autor.
"Aprovechamos las fuerzas específicas de forma y material en un campo eléctrico no uniforme", explica Alapan. "La forma del bastidor de la máquina, por un lado, y los actuadores, por otro, dictan los gradientes circundantes. Esto causa una fuerza de tracción entre las unidades que ensamblan la micromáquina. Al cambiar la forma, controlamos cómo se generan estos gradientes y, por lo tanto, cómo se atraen los componentes entre sí".
"Los componentes de nuestras micromáquinas pueden moverse en relación con los demás, lo que da otro nivel de locomoción compleja", dice Yigit. "Imagine las ruedas de un coche girando pero el chasis no cambia: el coche avanza y puede ir en muchas direcciones. En lugar de formar conexiones rígidas, cada parte puede moverse individualmente".
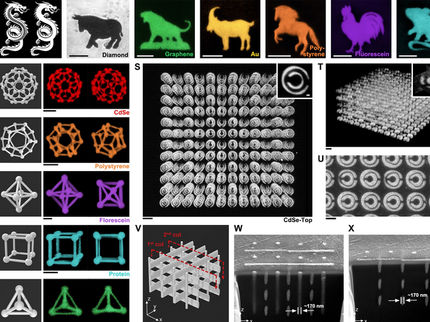
Los componentes individuales se construyeron mediante un método especial de impresión en 3D utilizando litografía de dos fotones. "Nuestro primer diseño fue un microcoche, como homenaje a la ubicuidad de la propulsión con ruedas en nuestras vidas", continúa Alapan. "Hemos fabricado el bastidor o chasis en 3D con sus bolsillos para las ruedas, ya que esta estructura genera fuerzas de gradiente muy atractivas para los microactuadores magnéticos: las ruedas. A los pocos segundos de aplicar el campo eléctrico, las ruedas se ensamblan en estos bolsillos". Los investigadores entonces dirigieron el microcoche por un campo magnético que rotaba verticalmente, como se puede ver aquí.
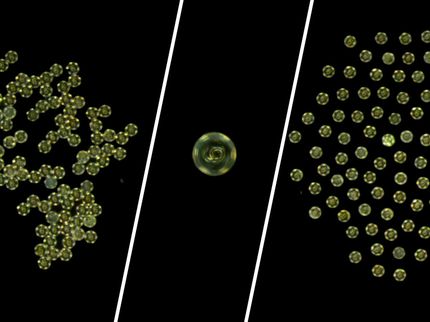
Alapan y Yigit probaron muchos tamaños y formas de componentes diferentes, y sus pequeños robots autoensamblados vienen en muchas variedades: Los investigadores pudieron construir un microcoche, un microrotor, algo que se asemeja a un pequeño cohete, e incluso una microbomba. Durante su rotación, las partículas magnéticas de la periferia de la bomba se mueven hacia arriba a lo largo de su espiral. Esto provoca un efecto de bombeo cuando una microbomba está cerca de otra. Los investigadores demostraron además que no sólo pueden ensamblar piezas de motor y estructurales de forma configurable, formando microrobots, sino que también pueden ensamblar varios microrobots juntos, allanando el camino para ensamblajes jerárquicos multirobot.
Ser capaz de moverse de muchas maneras diferentes es de gran beneficio: podría determinar si tales micromáquinas podrían o no ser desplegadas algún día para entregar medicamentos o detectar células tumorales dentro del cuerpo, donde la locomoción versátil es clave.
Los científicos creen que el autoensamblado para construir micromáquinas de diferentes formas y tamaños tendrá un gran impacto en la comunidad científica. "La detección móvil, la administración de medicamentos in vitro dirigidos, la manipulación de una sola célula y la actuación precisa a esta escala son grandes desafíos. Este nuevo enfoque podría reducir la complejidad de estas tareas", dice Sitti.
Nota: Este artículo ha sido traducido utilizando un sistema informático sin intervención humana. LUMITOS ofrece estas traducciones automáticas para presentar una gama más amplia de noticias de actualidad. Como este artículo ha sido traducido con traducción automática, es posible que contenga errores de vocabulario, sintaxis o gramática. El artículo original en Inglés se puede encontrar aquí.
Publicación original
Más noticias del departamento ciencias





















Noticias más leídas











Más noticias de nuestros otros portales

















Contenido visto recientemente
Industria Química del Istmo, S.A. de C.V. (Iquisa) - Mexiko-Stadt, México
Bernd Münstermann GmbH & Co. KG - Telgte, Alemania

Vehículos eléctricos duraderos - Las baterías de ión dual equipadas con un aglutinante de nuevo desarrollo mantuvieron un rendimiento excepcional, incluso después de soportar más de 3.500 ciclos de recarga
